AIR A01用の電動雲台として、9月の連休にステッピングモーターでパン(回転)、サーボモーターでチルトを行う雲台を作ってみた。10月の連休には、パンもサーボモーター(GWS S03T / 2BB)で行うバージョンに改造してみた。
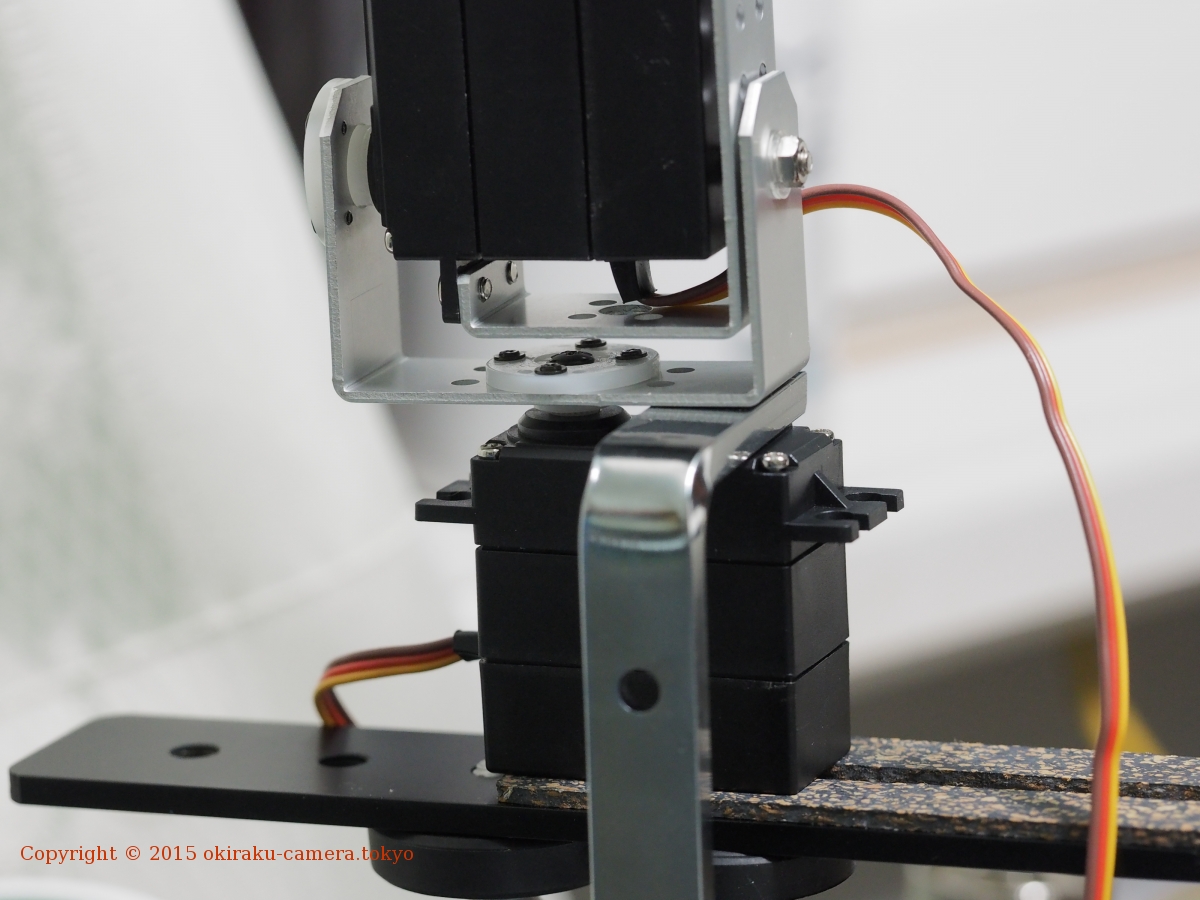 組立途中の写真になってしまうが、パン用(下側)のサーボモーターをブラケット板に固定し、そのサーボモーターの軸にチルト用のサーボモーターを取り付けている。チルト側には、浅草ギ研のサーボマウント(AGBL-S03T)を取り付けている。
組立途中の写真になってしまうが、パン用(下側)のサーボモーターをブラケット板に固定し、そのサーボモーターの軸にチルト用のサーボモーターを取り付けている。チルト側には、浅草ギ研のサーボマウント(AGBL-S03T)を取り付けている。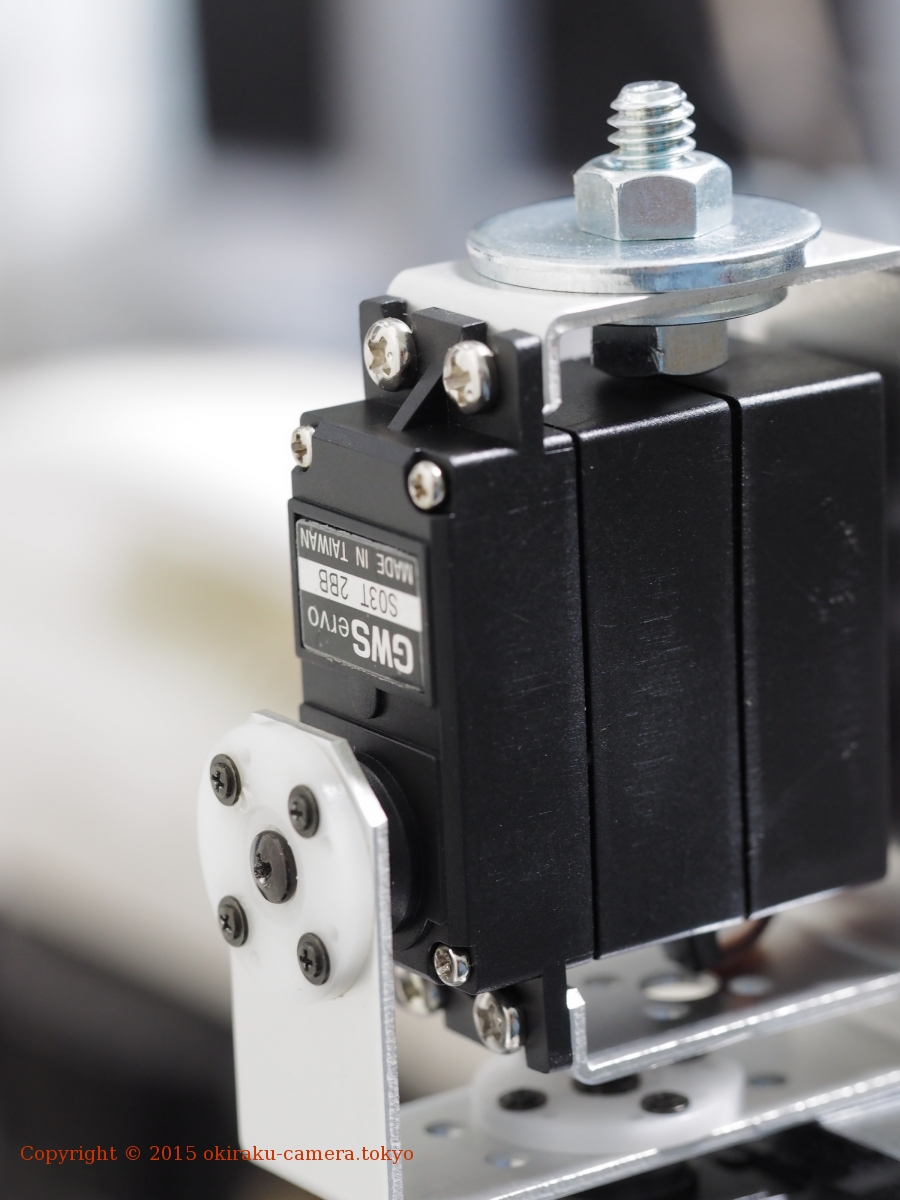
チルト用のサーボをステッピングモーターの軸上に取り付けていたときには、GWSのシールが正立する向きを上(カメラ側)としていたが、サーボ同志を接続するには、逆向きとした方が都合が良かった。
写真上部のボルトはW1/4という規格のもので、サーボマウントの穴を加工しなくて、すんなり通った。カメラの三脚穴と同じ規格であり、カメラを固定するために装着している。
仕組みのようなこと
サーボの駆動にはArduino MEGA ADKからPWM信号を出せばよいだけなので、I/Oピン2本しか使わない。また、サーボ用の電源は、三端子レギュレータ(TA4805S)を使って生成している。
Arduino MEGA ADKには、Androidアクセサリとしてスマホから認識するためのコードとサーボを駆動するためのコードをスケッチとして入れておき、USBケーブルでAndroidスマホ(MNPした空き家のdocomo)をつなぐ。スマホ上にもUSBアクセサリの脱着の認識や、アクセサリへのコマンド送信ができるアプリを用意しておき、必要に応じてパンやチルトを制御する。
AIR A01用のCAMERA KIT SDKと、Android アクセサリ関係のコードは共存するので、ライブビューを見ながらパン/チルトさせる、といったことも可能。
テスト用アプリ
今回は、単純に2つのサーボを動かすためのテスト用アプリを用意して動かしてみた。
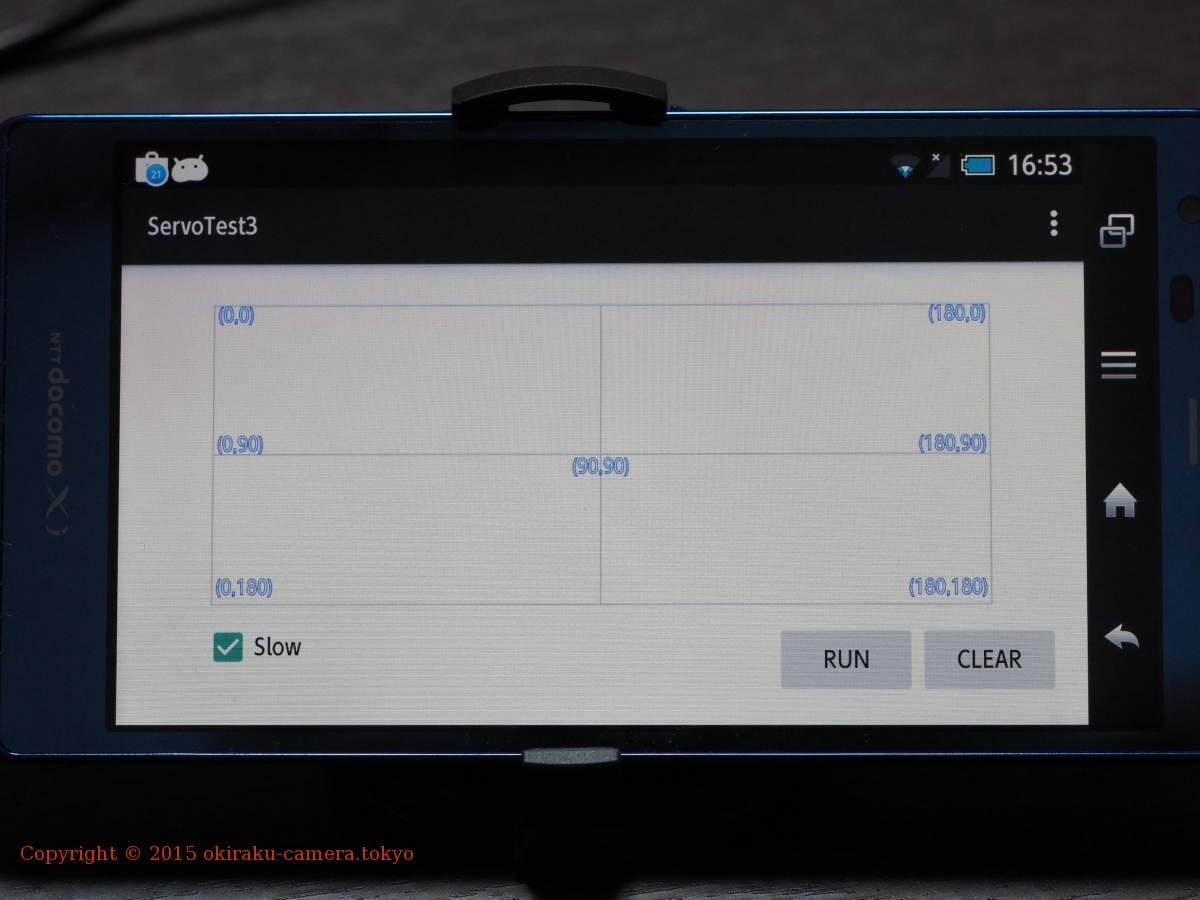 ビュー上の矩形は、横軸がパン用サーボの可動範囲(0~180度)、縦軸がチルト用サーボの可動範囲(0~180度)を表している。この矩形内に指でタッチして線を引いてやることで、パン用チルト用のサーボに角度を通知して駆動させてみる、というもの。
ビュー上の矩形は、横軸がパン用サーボの可動範囲(0~180度)、縦軸がチルト用サーボの可動範囲(0~180度)を表している。この矩形内に指でタッチして線を引いてやることで、パン用チルト用のサーボに角度を通知して駆動させてみる、というもの。
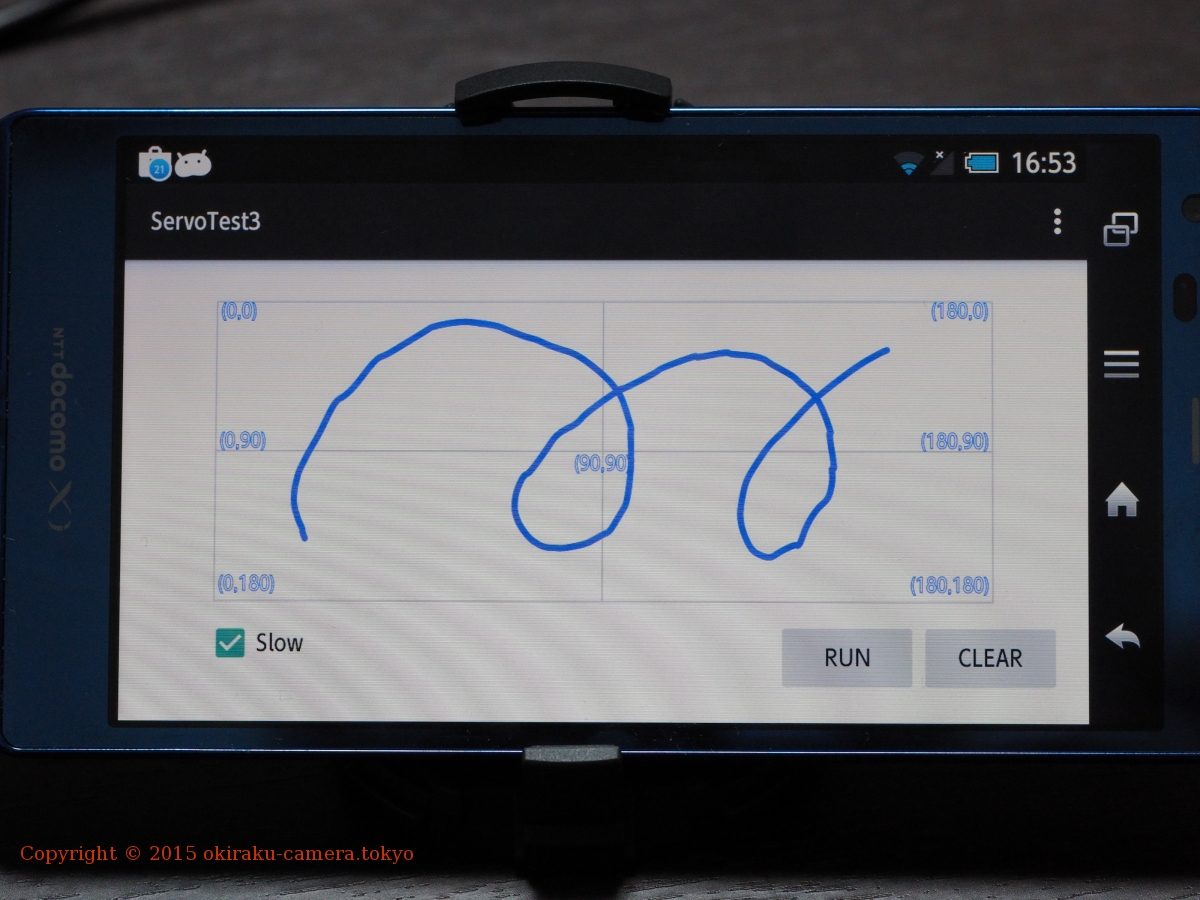 こんな感じに線を引ける。アプリ自体はAndroidのViewとかCanvasとかPaintとかのためのサンプルと同じようなものである。
こんな感じに線を引ける。アプリ自体はAndroidのViewとかCanvasとかPaintとかのためのサンプルと同じようなものである。
Runボタンで描画された線にしたがってサーボを駆動、Clearボタンでビューをクリアすると共に、2つのサーボを原点(90, 90)に戻す、Slowにチェックを入れると、ゆっくり動く、といった具合になっている。
線を引いて動かすところ。最初のRUN時にはSlowにチェックあり、二度目はチェックなし。サーボをよりゆっくり動かすことは可能だが、これ以上は速く動かない。
負荷が載ってない状態では、スムーズに動いてくれる。
負荷として、AIR A01を載せてみたところ。やってみて、しょうしょうガッカリした。サーボの駆動能力的にはなんとか間に合っているようだが、チルト側サーボをパン用サーボの軸上に直結してあるためか、ゆらゆらしてしまって安定感がない。
実際の撮影に使うときには、これほど大胆な(?)駆動は行わないし、もっとゆっくり動かせばよいような気もするが。
12月には自宅の野鳥用のエサ台を(個人的に)解禁するので、それまでにはパン、チルト、そしてピント合わせや撮影を遠く離れてできる仕組みを用意したい。その際には、雲台の動作指示をUSBケーブルではなくwifi経由で行いたいところ。AIR A01用と雲台用とで、2台の端末を使っても別に構わないわけで。